This article is part of CreedTec’s Enterprise Automation TCO Week, a 4-day analytical series breaking down the hidden financial metrics behind the world’s largest Industrial AI and robotics ecosystems.
Fast Facts
NVIDIA synthetic data is the foundation of a $3.09 billion simulation market — and NVIDIA’s own field deployments keep documenting the same limitation: pure synthetic data fails when the production environment doesn’t match the training environment. The fix isn’t abandoning synthetic data. It’s understanding precisely where it works and building procurement decisions around that boundary.
📊 By the Numbers
- $3.09B — Projected global robotic simulator market by 2035, up from $820M in 2025 (Precedence Research, April 2026)
- 24–30% — Real-world performance drop when robot policies are transferred directly from pure simulation to live hardware (Yang et al., arXiv, August 2025)
- 0.95 mAP — Defect detection accuracy achieved by Corning using just 8 real images plus NVIDIA Cosmos synthetic examples — demonstrating that real-data anchoring is the key variable (Roboflow/NVIDIA, June 2026)
- A decade — Roboflow’s characterisation of how long the visual inspection data gap has “stalled programs on plant floors” before real-grounded synthetic data began closing it (Roboflow, June 2026)
NVIDIA synthetic data limitations on factory floors are not a secret buried in academic papers. They are documented in NVIDIA’s own deployment partnerships, acknowledged in their platform release notes, and actively being addressed by every major update to Isaac Sim, Cosmos, and Omniverse Replicator. The company building the world’s most commercially successful synthetic data infrastructure is simultaneously the company whose field evidence most clearly shows where that infrastructure reaches its boundary.
That isn’t a contradiction. It’s a product roadmap. And understanding the gap it reveals tells factory operators exactly which simulation investments will pay back — and which ones will produce a robot that works in the lab and fails on Tuesday morning’s production run.
The Domain Gap Is Not a Bug. It Is the Business Model.
Synthetic data fails when the training environment doesn’t adequately represent the deployment environment. Variations in lighting, surface texture, component geometry, occlusion patterns, and sensor noise — none of which behave identically in a physics engine and a real factory — create a domain gap that a model trained on pure synthetic data encounters as performance degradation the moment it goes live.
Research published at CVPR 2026’s Synthetic Data for Computer Vision workshop included a direct paper examining “Why Training with Synthetic Data Fails for OOD: Distribution Gap Amplifies Noise Misalignment.” The authors weren’t writing about edge cases. Out-of-distribution failure is the default outcome for pure synthetic training when real-world conditions diverge from the simulation parameters — which, on most production floors, they always do.
The domain gap is also the business model. Every NVIDIA platform update that improves physics realism, neural rendering, or sensor accuracy closes the gap incrementally — and requires factories to upgrade their simulation infrastructure to access the improvement. NVIDIA’s RoboLab benchmark is built to track this progress transparently, but each improvement also signals that the previous generation of synthetic data was operating closer to the boundary than buyers realised
Corning’s Benchmark Shows Exactly Where the Boundary Is
On June 1, 2026, Roboflow published a benchmark from Corning Incorporated’s optical fiber manufacturing team that is the clearest documented statement of where synthetic data works in 2026. A defect detection model trained on just eight real defect images, augmented with synthetic examples generated by NVIDIA Cosmos, reached 0.95 mean average precision — beating a baseline trained on real data alone.
The operative word is “anchored.” The synthetic data was grounded in Corning’s own product geometry and real reference examples, with controlled variation across lighting and material conditions. This is not pure synthetic data. It is real-data-anchored synthetic data — and the distinction is the entire financial argument. The sim-to-real transfer problem that produces 24–30% performance drops is specifically a problem of unanchored simulation. Corning’s 0.95 mAP result is what happens when the anchor is in place.
“The lack of defect training data is the most common reason new product introductions stall on the line — and it has stalled visual inspection programs on plant floors for the better part of a decade.”
— Roboflow / NVIDIA Defect Image Generation Partnership, June 2026
The Procurement Question Most Factories Get Backwards
Most factory automation budgets frame the synthetic data question as: “How much synthetic data infrastructure do we need?” The correct question is: “How many real reference examples do we need to anchor the synthetic data we generate?” The answer to the second question determines the value of the first.
Fraunhofer IFAM’s production environment research documented up to 15% performance improvement when domain knowledge — actual production geometry, real assembly conditions — is incorporated into synthetic data generation for complex industrial parts. Without that grounding, generic synthetic data produces models that fail on the specific sub-assemblies, occlusion patterns, and surface conditions that define real production. Photorealistic digital twin training addresses this precisely because it starts from a real-world scan, not a hypothetical geometry.
⚠ Fiction — Illustrative Scenario
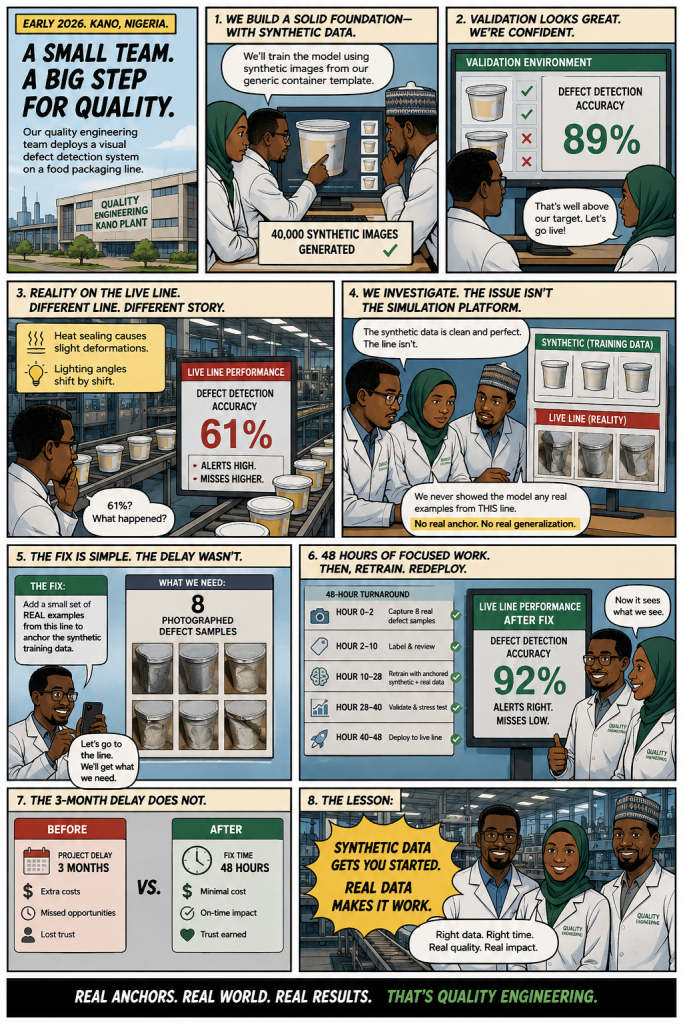
A quality engineering team at a food packaging facility in Kano deploys a visual defect detection system in early 2026. The model is trained on 40,000 synthetic images generated from a generic container geometry template. Defect detection accuracy in the validation environment runs at 89%. On the live line — where packaging is slightly deformed from the heat sealing process and lighting angles shift by shift — accuracy drops to 61%. The issue isn’t the simulation platform. It’s that no real examples from that specific line were ever used to anchor the synthetic training data. The fix takes 48 hours and eight photographed defect samples. The three-month delay does not.
Emerging Market Factories Face the Widest Anchoring Gap
The domain gap problem compounds for facilities in Nigeria, West Africa, and Southeast Asia where the synthetic training data being sold into these markets was built and validated against Western and East Asian production environments. Equipment wear patterns, ambient conditions, power fluctuation effects on lighting, and non-standard component sourcing all create real-world conditions that the synthetic training library doesn’t contain.
Pre-trained vision models already fail in dust-heavy environments that weren’t represented in their training data — the same principle at a factory level. The solution is the same as Corning’s: a small number of real reference examples from the actual deployment environment, used to anchor synthetic generation. The capital cost of that anchoring step is minimal. The operational cost of skipping it is documented and recurring. The simulation metric that actually determines ROI is transfer performance — and transfer performance is only achievable when the synthetic data reflects where the robot actually works.
💡 CreedTec Analyst’s Note
Daniel Ikechukwu — Strategic Impact
NVIDIA is not hiding the synthetic data limitation problem — they are actively building the solution stack for it: Cosmos, NuRec, Omniverse Replicator with domain randomization. The financial implication for factory buyers is that the value of synthetic data infrastructure is directly proportional to the quality of the real-world anchoring used to configure it. Buying simulation infrastructure without budgeting for real-data collection and grounding is buying half the system. The gap that produces the 24–30% performance drop is not a technology failure. It is a deployment configuration failure — and it is preventable.
- Stop: Evaluating synthetic data investments on simulation accuracy alone. Demand documented transfer performance on environments that match your specific production conditions.
- Start: Allocating a real-data collection budget alongside every synthetic data infrastructure investment. Even a small number of real reference examples — as the Corning benchmark demonstrates — is the variable that determines whether the system works at deployment.
- Watch: NVIDIA’s NuRec neural rendering integration in Isaac Sim — specifically its ability to reconstruct a digital twin from a smartphone scan. If that capability matures as documented, the cost of real-world anchoring drops to near zero, which closes the gap between synthetic data’s promise and its delivery.
ROI Outlook: Facilities that combine NVIDIA synthetic data infrastructure with a structured real-data anchoring process — minimum 8–20 real reference examples per product variant, per line — will achieve transfer performance comparable to Corning’s 0.95 mAP benchmark. Facilities that deploy pure synthetic training without anchoring will absorb the 24–30% performance gap as recurring operational cost. The difference between those two outcomes is a data collection workflow, not a platform decision.
Frequently Asked Questions
Does NVIDIA acknowledge the synthetic data domain gap publicly?
Yes — directly. NVIDIA’s own blog posts, Isaac Sim release notes, and Cosmos documentation explicitly describe the simulation-to-reality gap as the problem these platforms are built to address. Every NuRec and Cosmos update is specifically designed to close it. The gap is not concealed; it is the stated technical challenge driving NVIDIA’s entire physical AI roadmap.
What is the minimum real-world data needed to anchor synthetic training effectively?
The Corning/Roboflow benchmark demonstrates 0.95 mAP from just 8 real defect images when combined with NVIDIA Cosmos synthetic generation. Fraunhofer IFAM research shows meaningful improvement from domain-specific grounding in complex assembly environments. The anchor doesn’t need to be large — it needs to be representative of the specific production conditions where the model will be deployed.
Should factories in emerging markets invest in NVIDIA synthetic data infrastructure?
Yes — with a condition. The infrastructure investment only delivers its documented ROI when paired with a real-data anchoring process calibrated to local production conditions. A generic synthetic dataset built for a European production environment will not transfer cleanly to a Nigerian or Southeast Asian facility with different ambient conditions, component sourcing, and equipment wear patterns. Budget for both the platform and the anchoring step — or the platform delivers below benchmark.
Robotics simulation intelligence, synthetic data strategy, and deployment analysis — built for engineers and procurement teams who need the real picture before the purchase order.


