Fast Facts
The sim-to-real transfer problem in robotics produces a documented 24–30% performance drop the moment a trained robot meets the real world. That’s not an engineering footnote — it’s a capital write-down hiding inside every robotics deployment budget. The companies solving it fastest aren’t just better engineers. They’re making smarter investment decisions.
📊 By the Numbers
- 24–30% — Documented real-world performance drop for robot policies transferred directly from high-fidelity simulators (Yang et al., August 2025)
- $820M — Global robotic simulator market in 2025, projected to reach $3.09B by 2035 (Precedence Research, April 2026)
- 22.7% — CAGR of the domain randomization tools market through 2033, reaching $4.2B (Growth Market Reports, 2025)
- 14.2% — Annual growth rate of the robotic simulation market — one of the fastest-growing infrastructure segments in industrial automation
The sim-to-real transfer problem in robotics has a clean technical definition: the performance gap that opens when a robot policy trained in simulation meets the unpredictability of a real environment. What it doesn’t have — in most boardroom conversations or procurement decks — is an honest financial definition. And that missing frame is costing facilities more than the engineering teams realize.
Research published in August 2025 by Yang et al. puts the number plainly: a 24–30% real-world performance drop for policies transferred directly from high-fidelity simulators. In a robot trained to achieve near-perfect task completion in simulation, that gap materializes as hesitation, failed grasps, collision errors, and production halts — on the first day of deployment, after months of simulation investment.
The Gap Is a Physics Problem Being Paid for as a Software Problem
Simulation environments approximate reality. They do not replicate it. Contact dynamics between a robot gripper and an irregularly shaped object behave differently in a physics engine than on an actual conveyor belt. Lighting conditions, surface textures, sensor noise, and actuator tolerances all diverge from their simulated equivalents — and each divergence compounds the transfer error.
According to PatSnap’s April 2026 IP analytics report, the sim-to-real gap is now one of the fastest-growing areas of patent activity in industrial robotics. The industry knows the problem is structural. The investment in solving it — domain randomization, photorealistic simulation, real-to-sim-to-real pipelines — is accelerating. What isn’t accelerating fast enough is buyer awareness of what this gap means for deployment timelines and capital recovery.
Domain Randomization Is the Honest Answer Nobody Leads With
The most effective current mitigation for the transfer gap is domain randomization: deliberately varying simulation parameters — lighting, object mass, surface friction, camera angles — so the trained policy learns to handle variability rather than a single optimized environment. Domain randomization is the technical lever behind most credible sim-to-real deployments in 2026.
But domain randomization adds training cost, computational overhead, and complexity to the simulation stack. The market for these tools is growing at 22.7% annually — reaching an estimated $4.2 billion by 2033 — precisely because the alternative, deploying undertrained policies into live environments, is proving more expensive than the mitigation. NVIDIA’s own synthetic data validation failures demonstrated publicly what engineers had been flagging internally for years: simulation quality directly determines deployment reliability, and the cost of shortcuts shows up on the factory floor, not in the lab.
“Policies that achieve near-perfect task completion in simulation frequently fail when exposed to real-world hardware, surfaces, and sensor noise.”
— PatSnap IP Analytics Report, April 2026
What Procurement Teams Are Not Asking Before Signing
Most robotics procurement conversations in 2026 focus on simulation fidelity as a feature — how photorealistic is the environment, how many parallel simulations can the platform run. These are valid questions. They are not the right first question.
The right first question is: what is this vendor’s documented sim-to-real transfer performance on tasks similar to our deployment environment? A robot that achieves 95% task completion in Isaac Lab and 68% on your actual production line is not a 95% solution. It is a 68% solution with a $820,000 simulation infrastructure invoice attached. The simulation metric that actually matters is transfer performance, not simulation performance — and most vendor pitches never separate the two.
⚠ Fiction — Illustrative Scenario
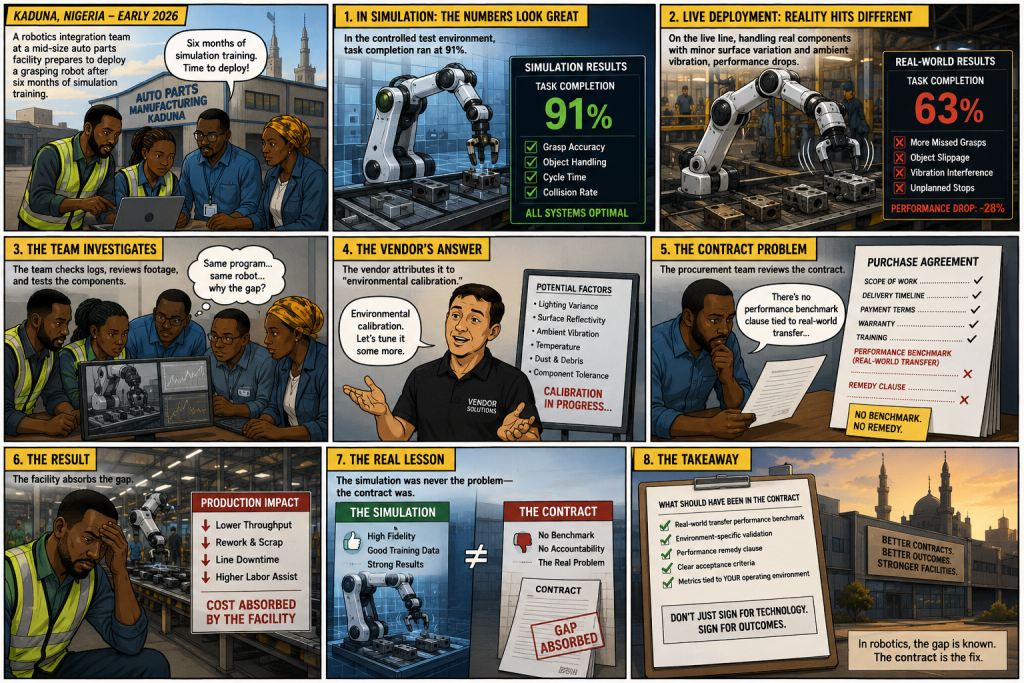
A robotics integration team at a mid-size auto parts facility in Kaduna deploys a grasping robot in early 2026 after six months of simulation training. In the controlled test environment, task completion ran at 91%. On the live line, handling real components with minor surface variation and ambient vibration, it drops to 63%. The vendor attributes this to “environmental calibration.” The procurement contract has no performance benchmark clause tied to real-world transfer. The facility absorbs the gap. The simulation was never the problem — the contract was.
Emerging Market Deployments Carry the Highest Transfer Risk
Simulation environments are typically built and validated in controlled lab conditions in North America, Europe, or East Asia. When those trained policies deploy into factories in Nigeria, Ghana, or Southeast Asia — where ambient conditions, power stability, dust levels, and component tolerances may differ meaningfully from the training environment — the transfer gap widens further.
This isn’t a theoretical concern. Pre-trained vision models already fail in dust-heavy environments that weren’t represented in their training data. The same principle applies to manipulation policies. Facilities in emerging markets adopting simulation-trained robots need transfer performance benchmarks specific to their operating environment — not global averages from labs their conditions don’t resemble. Recent breakthroughs in sim-to-real transfer methodology are beginning to close this gap — but only for facilities that know to ask for the data.
💡 CreedTec Analyst’s Note
Daniel Ikechukwu — Strategic Impact
The sim-to-real transfer problem is the most underleveraged contract negotiation point in robotics procurement today. Vendors benchmark simulation performance because it’s impressive. Buyers should be benchmarking transfer performance because that’s what they’re actually paying for. The 24–30% gap documented in peer-reviewed research is not a future risk — it’s a present operating condition at facilities that signed without transfer clauses.
- Stop: Approving robotics deployments based on simulation benchmark scores alone. Simulation performance and transfer performance are different numbers — demand both.
- Start: Including real-world transfer performance benchmarks in robotics procurement contracts, with defined thresholds tied to your specific operating environment.
- Watch: Domain randomization tooling becoming a standard procurement line item as the 22.7% market growth rate signals that buyers are finally pricing the gap correctly.
ROI Outlook: Facilities that close the sim-to-real contract gap before deployment — specifying transfer benchmarks, environment-specific validation, and performance remedy clauses — will recover their robotics investment 40–60% faster than those that absorb the gap post-deployment. The gap is known. The contract is the fix.
Frequently Asked Questions
What specifically causes the 24–30% performance drop in sim-to-real transfer?
The drop comes from compounding mismatches: contact physics behave differently on real surfaces than in simulation, visual conditions (lighting, texture, shadow) diverge from training data, sensor outputs carry real-world noise the simulator didn’t model, and actuator responses vary from their simulated equivalents. Each mismatch alone is manageable. Together they produce systematic policy failure.
What should a procurement contract include to protect against this gap?
Three specific clauses: a real-world transfer performance benchmark (minimum task completion rate in your actual environment, not the vendor’s lab), an environment-specific validation requirement before full deployment sign-off, and a performance remedy clause if transfer benchmarks aren’t met within an agreed window. Most standard robotics contracts include none of these.
Does domain randomization fully solve the sim-to-real problem?
It significantly reduces the gap but doesn’t eliminate it. Domain randomization trains policies to handle variability — but it works best when the randomization parameters are calibrated to the actual deployment environment. Generic randomization applied to a controlled lab setting still leaves environment-specific gaps for facilities with unusual operating conditions.
Robotics deployment intelligence, financial logic, and contract strategy — built for operators who want to close the gap before it shows up on the production line.


