Fast Facts
Grasping — the ability to pick up objects reliably across varied shapes, materials, and conditions — has been the hardest unsolved problem in robot manipulation for decades. In 2026, three developments are converging to crack it: the GRIP dataset (100,000 grasp poses across 1,200 objects, 48× faster simulation), MolmoBot’s fully synthetic grasping training that transfers zero-shot to real robots, and NVIDIA Newton 1.0’s physics engine built specifically for accurate contact simulation. Together they represent the moment simulation stopped approximating grasping and started solving it.
Getting a robot to pick something up sounds trivial until you try to build one that does it reliably. Robot grasping simulation in 2026 is finally delivering what decades of robotics research promised but consistently failed to produce: training pipelines that teach robots to handle objects they’ve never seen, in configurations they’ve never encountered, without months of real-world data collection. The implications for industrial deployment are direct and significant.
| Stat | Value |
|---|---|
| 100K | Grasp poses in GRIP dataset — 1,200 objects, soft and rigid grippers |
| 48× | Simulation speedup via IPC physics — GRIP dataset pipeline |
| 35% | Of grasping patents now in deep learning prediction — PatSnap 2026 |
| 0 | Real-world data used in MolmoBot grasping training — fully synthetic |
What Made Grasping So Hard — and What Changed in 2026
The core difficulty is contact physics. When a robot hand touches an object, the forces involved — friction, deformation, pressure distribution across contact surfaces — are extraordinarily complex to simulate accurately. Get the physics wrong and the robot’s training policy doesn’t transfer to the real world. This is why most grasping research until recently required extensive real-world data collection: simulation couldn’t be trusted for the contact-rich moments that matter most.
Two things broke that constraint simultaneously. First, the GRIP dataset — built on Incremental Potential Contact (IPC) simulation — achieves 48× faster processing while maintaining intersection-free, physically accurate contact simulations across both soft and rigid objects. For the first time, generating 100,000 diverse grasp poses across 1,200 objects became computationally tractable without sacrificing the physics accuracy that makes simulation transfer to reality. Second, NVIDIA’s Newton 1.0 — released in April 2026 — provides an open-source physics foundation specifically built for dexterous manipulation, with accurate collision detection and stable simulation of both rigid and flexible parts in the same scene.
“It becomes possible to train robots that can grasp unfamiliar objects, manipulate articulated surfaces, and operate reliably in unstructured environments. We see MolmoBot as a test of whether fully synthetic training can work for manipulation.”— Allen AI, MolmoBot blog (March 11, 2026)
MolmoBot’s answer to that test is definitive. Trained entirely on synthetic data with fully randomised cameras — no real-world demonstrations, no digital twin matching — it transfers zero-shot to real robots across pick-and-place, drawer and cabinet manipulation, and door opening tasks. The MolmoBot zero-shot transfer analysis laid out the technical foundation. What matters operationally: a robot that can be trained to grasp without collecting real-world data is a robot that can be retrained quickly and cheaply when product lines change.
The Robot Grasping Simulation Gap That Factory Operators Haven’t Priced In
Grasping failure is the silent cost driver in robot deployment that most procurement decisions don’t account for. A robot that picks up 94% of items correctly isn’t doing a 6% error rate — it’s creating a 6% rework stream, a quality audit problem, and a throughput bottleneck that compounds across every SKU it touches. The economics of improving grasping reliability from 94% to 99% are not linear. They’re the difference between a robot that assists a production line and one that runs it.
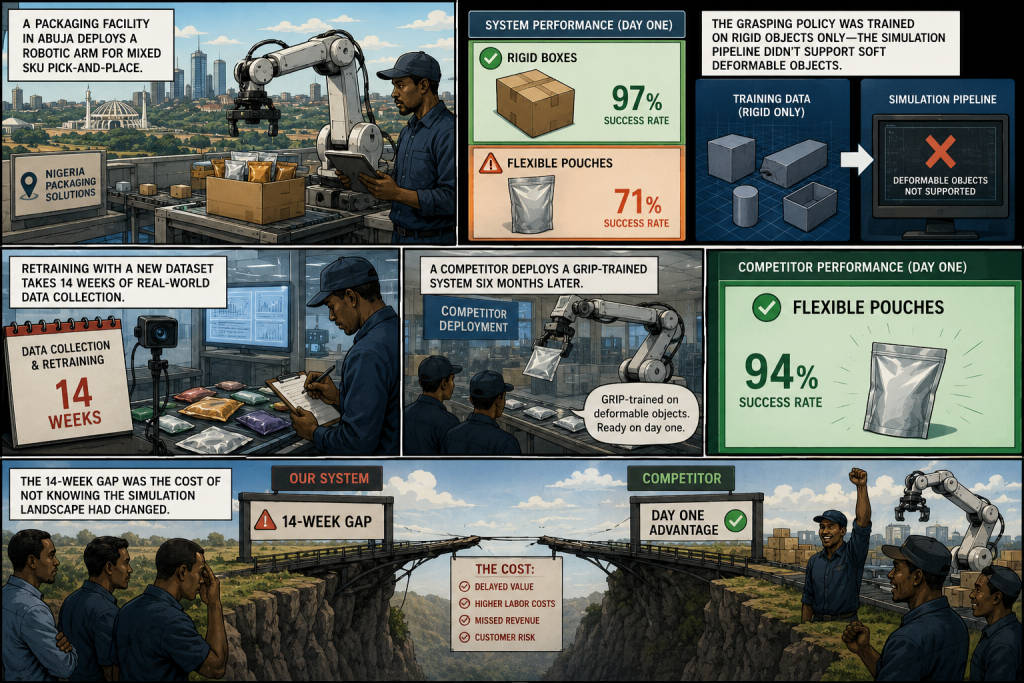
⚠ Fiction — Illustrative Scenario
A packaging facility in Abuja deploys a robotic arm for mixed SKU pick-and-place. The system handles rigid boxes at 97% success. Flexible pouches: 71%. The grasping policy was trained on rigid objects only — the simulation pipeline didn’t support soft deformable objects. Retraining with a new dataset takes 14 weeks of real-world data collection. A competitor deploys a GRIP-trained system six months later. Their flexible pouch success rate is 94% on day one. The 14-week gap was the cost of not knowing the simulation landscape had changed.
The patent landscape confirms where investment is going. According to PatSnap Eureka’s 2026 grasping patent analysis, deep learning grasp prediction now accounts for 35% of technically substantive patents — the dominant cluster. Reinforcement learning and tactile grasping follow at 25%. Fanuc leads in simulation-to-real transfer patents. Samsung’s task-aware grasp estimation connects pick-and-place into a unified neural planning problem, reducing re-grasp events and improving cycle time. The commercial application layer is being built now, on top of the simulation infrastructure that 2026 delivered. The Sony Project Ace sim-to-real training breakthrough proved physics model accuracy is the decisive variable — grasping simulation is learning the same lesson at scale.
💡 Analyst’s Note
By Daniel Ikechukwu
Strategic Impact
The convergence of GRIP, MolmoBot, and Newton 1.0 in 2026 represents the moment grasping simulation became industrially trustworthy. The previous constraint — simulation couldn’t accurately model contact physics for deformable objects — is removed. What remains is adoption lag: most industrial robot deployments still use grasping policies trained on limited real-world data or narrow object sets. The factories that close this gap first — deploying simulation-trained grasping with broad object coverage — capture the throughput advantage before competitors who are still waiting for “production-ready” grasping to arrive from their existing vendor.
Stop / Start / Watch
- STOP accepting grasping success rate benchmarks measured on a vendor’s controlled object set. Ask specifically: what is the grasping success rate on your actual SKU mix, including flexible and irregular objects? That number — not the demo number — determines your rework rate.
- START requiring simulation training pipeline disclosure in robot procurement. Does the vendor use IPC-based or equivalent physics simulation? Does their training include deformable objects? Can they retrain for new SKUs without real-world data collection? These questions separate 2026-capable systems from legacy approaches wearing new labels.
- WATCH NVIDIA Newton 1.0 adoption across robot vendors through Q3 2026. Newton’s open-source release means the physics foundation is now free to use — the vendors integrating it fastest will have the most accurate grasping simulation at the lowest training cost.
ROI Outlook
Moving from 94% to 99% grasping success on a 500-unit daily pick volume eliminates 25 failed picks per day. At 2 minutes average rework per failure, that’s 50 minutes of rework recovered daily — roughly 200 hours annually per robot. At industrial labour rates, that’s $6,000–$12,000 in annual recovered labour per robot before accounting for throughput improvement. For a 10-robot deployment, the grasping reliability gap is a $60,000–$120,000 annual cost that most procurement decisions never quantify. The simulation tools to close it now exist.
Your Robot’s Grasping Rate Has a Number — Do You Know It?
We track the manipulation simulation breakthroughs, grasping training pipelines, and deployment benchmarks that industrial operators need before the next procurement decision.
Join the Newsletter →


